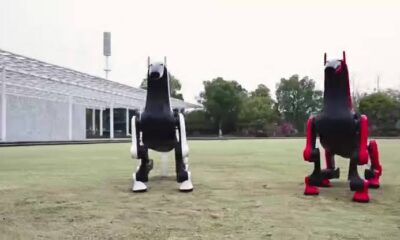
TECH – Kawasaki Heavy Industries has introduced CORLEO, a wolf-inspired, four-legged robot designed to navigate uneven terrains, offering a potential all-terrain alternative to traditional motorcycles. Unveiled at the Osaka Kansai Expo on April 4, 2025, CORLEO remains in its conceptual phase. The robot is equipped with artificial intelligence to enhance balance and coordination, allowing it to respond adeptly to the rider’s body movements and adjust to shifts in center of gravity in real-time. This responsiveness aims to reduce the risk of falls during operation.
CORLEO’s design features inward-facing knees and rubber hooves that are slip-resistant and capable of absorbing surface irregularities. These attributes enable the robot to adapt to various terrains, including grasslands, rocky areas, and rubble fields. Additionally, the rear leg units can move independently from the front, allowing them to absorb shocks during movement. The robot is powered by a hydrogen-fueled 150cc engine, which emits only water, positioning it as an environmentally friendly mode of transportation. The hydrogen tanks are located in the rear and can be easily refueled using hydrogen gas. Specific details regarding speed, range, and battery life have not yet been disclosed.
Read More: Researchers Identify Key Differences in Human and AI Thought Processes
CORLEO also includes a dashboard display that provides crucial riding information, such as weight distribution and hydrogen levels. For nighttime operation, it features a projector that displays markers onto the road surface to indicate the path ahead, enhancing safety during low-visibility conditions. While Kawasaki has not announced a definitive timeline for CORLEO’s commercialization, the company has hinted at a potential launch by 2050. In the interim, a full-scale model of the robot will be on display at the Osaka-Kansai Expo, which runs from April to October 2025.
Kawasaki’s development of CORLEO reflects a growing trend in robotics, where companies are exploring innovative designs inspired by animals to create machines capable of traversing complex terrains. This approach aims to combine the agility and adaptability of quadrupeds with advanced robotic technologies to address challenges in transportation and mobility.