TECH – In a quiet lab in the United States, engineers are tackling one of robotics’ oldest challenges making a two-legged machine walk with balance, poise and the kind of resilience we take for granted every time we take a step.
According to Interesting Engineering, researchers at the University of Illinois’ Kinetic Intelligent Machine LAB (KIMLAB) have built a bold new bipedal robot platform named HybridLeg that’s designed not just to walk, but to learn how to walk in real-world environments using reinforcement learning — a type of machine learning where robots figure things out through trial, error and feedback rather than pre-programmed steps.
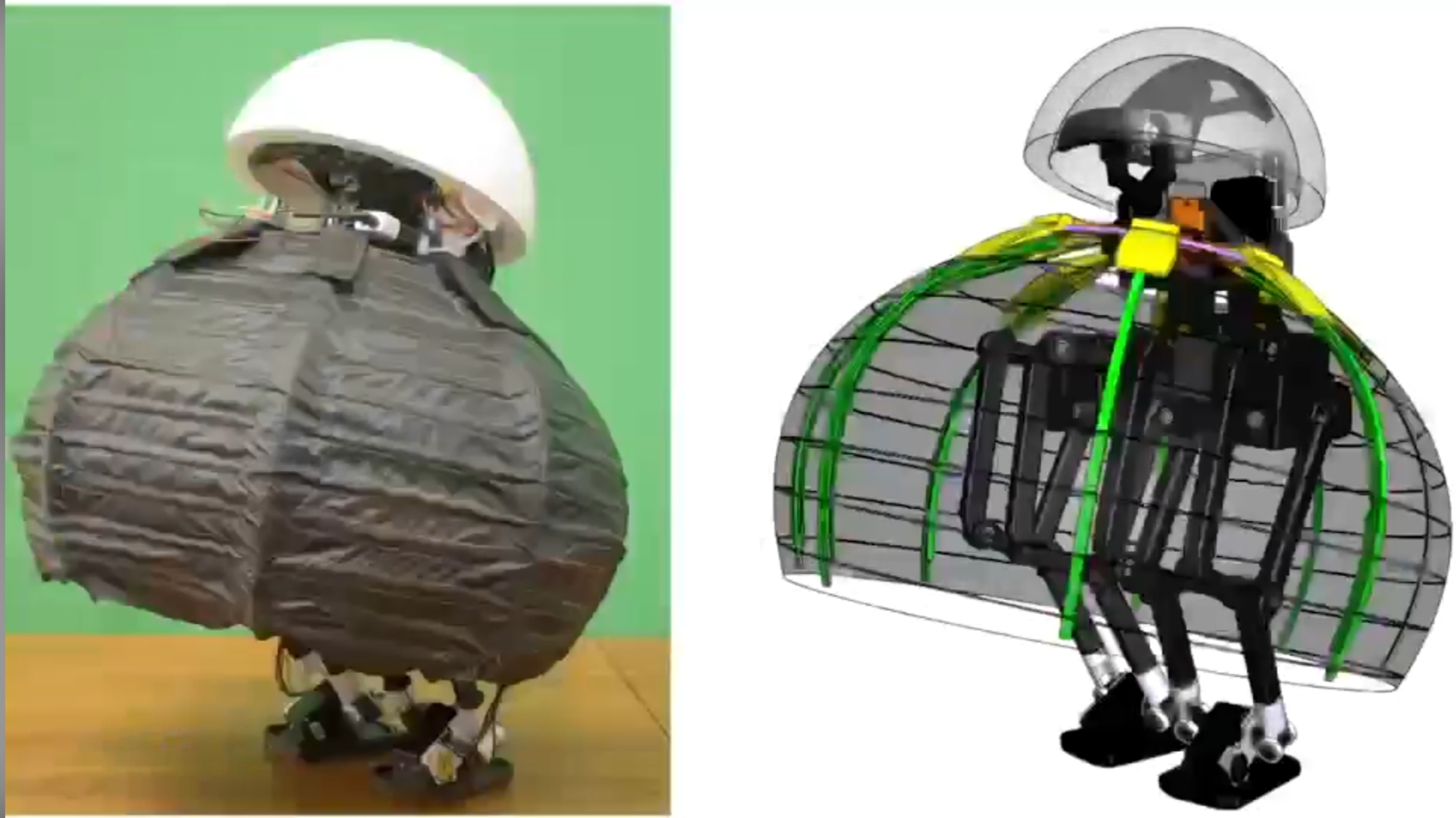
What sets HybridLeg apart is its innovative mechanical structure: rather than mimicking the human skeleton’s joints in a straight line, each leg blends serial and parallel linkages to form a five-bar system that combines the best of both designs. This hybrid configuration gives the robot six degrees of freedom per leg, low inertia and a broad range of movement — traits that are crucial for agile, human-like gait. At 1.84 meters tall and weighing only 29 kilograms, it’s impressively large yet light enough to react quickly to balance changes and environmental forces.
Read More: Qualcomm Unveil Snapdragon X2 Plus, Redefines Midrange PC Chips
Engineers concentrated most of the robot’s 12 motors near the pelvis, leaving only two at the ankles. This decision significantly reduces weight at the extremities, making its motion — especially the swing of each leg — easier to model and control using physics-based algorithms paired with reinforcement learning. The robot carries all necessary processing hardware onboard, including a single-board computer and sensors like IMUs, so it doesn’t need external tethers to try out steps, stumbles and recoveries.
One of the biggest hurdles for real-world biped robots isn’t just walking; it’s falling safely and getting back up. The HybridLeg platform integrates a multimodal fall detection system — combining inertial, positional and acoustic inputs — plus a stance-phase tracking algorithm that helps it recognize when it’s about to tip over and autonomously reset itself so learning can continue without human intervention.
This self-resetting ability, paired with its adaptive structure, opens the door to “long-horizon” reinforcement learning experiments outside of controlled labs, a leap forward from simulations to real floors and obstacles. As robots learn not just to walk but to recover and adapt, HybridLeg points toward a future where humanoid robots move with confidence in unpredictable environments, blending mechanical ingenuity with the growing power of AI.